モーショントラッキングIoTにおける
座標設計と可視化アーキテクチャの考え方
カメラを活用したモーショントラッキングIoTは、さまざまな分野で応用が広がっています。
- 空間内の動線分析
- 滞在傾向の把握
- 混雑状況の可視化
- 安全管理用途
しかし、動体を検出できることと、意味のある空間データとして活用できることは必ずしも同義ではありません。
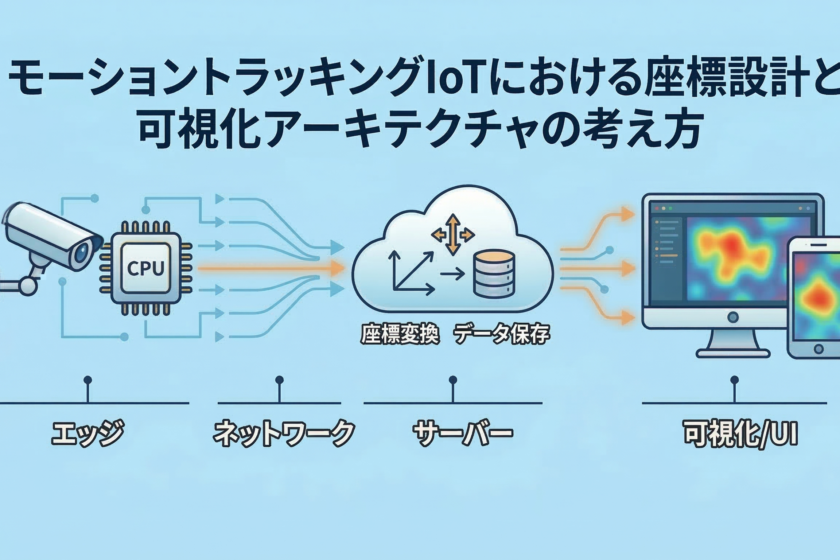
本記事では、
モーショントラッキング → 座標保存 → ヒートマップ可視化
までの流れを通して、モーショントラッキングIoTにおける設計上の考え方を整理します。
1. エッジは「観測」に徹するという考え方
モーショントラッキングIoTの第一層はエッジデバイスです。
エッジ側では主に:
- 映像取得
- 動体検出
- 個体追跡
- 座標送信
を行います。
設計の選択肢として、エッジ側で空間変換や可視化まで行う構成も考えられます。
ただし、多くの場合、IoTシステムでは
エッジはできるだけ観測に徹する構成
が採用されることが多いように感じています。
理由のひとつは、エッジデバイスは増える前提だからです。
台数が増加した際に、
- ロジック更新が複雑化する
- バージョン差異が発生する
- 運用負荷が増大する
といったリスクが考えられます。
そのため、本記事の構成ではエッジ側の責務を比較的シンプルに保つ設計としています。
2. なぜ画像座標のまま送信するのか
検出された動体は、まず画像上のピクセル座標として取得されます。
この段階で空間座標へ変換してから送信する構成も理論上は可能です。
しかし、設計上はあえて画像座標のまま送信する方式を採用しています。
座標変換は環境依存処理であることが多い
画像→空間変換は、
- カメラ設置位置
- 角度
- レンズ特性
- キャリブレーション状態
といった環境要素に依存します。
このような処理は、多くの場合、
中央で一元管理した方が変更や調整に柔軟に対応しやすい
という側面があります。
そのため、本構成では
- エッジは画像座標を送信
- 変換はサーバー側で実施
という役割分離を行っています。
3. データは可能な限り統一座標で保持する
サーバー側で画像座標を空間座標へ変換し、保存する際には統一された座標系を使用しています。
モーショントラッキングIoTでは、この「座標系の統一」が重要になるケースが多いと考えています。
座標系が分断されると起こり得ること
- カメラごとのデータが統合しづらい
- 複数カメラのヒートマップ合成が困難
- 空間分析の再利用性が下がる
IoTシステムでは、
データの保存形式が将来的な拡張性に影響することが少なくありません。
そのため、できるだけ早い段階で空間座標に統一する設計としています。
4. リアルタイム性と持続性のバランス
モーショントラッキングIoTでは、リアルタイム表示を重視する設計も多く見られます。
一方で、多くの実運用環境では、
- 常時安定稼働
- データ欠損の回避
- 通信負荷の抑制
も同様に重要になります。
本構成では、データを一定間隔でバッチ送信する方式を採用しています。
リアルタイム性と安定性のバランスを取るための一つの選択
環境や用途によって最適解は異なりますが、継続的に動作する仕組みを優先する設計が適する場面も少なくありません。
5. 可視化は後段に配置する
ヒートマップは最終的な「表現層」です。
表示方法やUIは時間とともに変化する可能性があります。
そのため、
- データ処理層
- 可視化層
を分離しておく設計は、多くの場合変更に強い構成になります。
サーバー側は座標データを提供し、表示ロジックはフロントエンド側で柔軟に実装する形を採用しています。
6. キャリブレーションの重要性
モーショントラッキングIoTでは検出精度が注目されがちですが、実際の空間分析では
座標変換の整合性
が重要になるケースも少なくありません。
- ヒートマップの歪み
- 動線の不整合
- 分析精度の低下
といった問題につながる可能性があります。
空間を扱うIoTでは、数学的整合性の確保が基盤になることが多いと感じています。
まとめ
モーショントラッキングIoTの設計では、
- エッジは観測中心に
- 環境依存ロジックは中央管理
- 座標系は可能な限り統一
- データと可視化を分離
といった考え方が有効になる場面があります。
用途や規模によって最適な構成は変わりますが、
空間データをどの層でどう扱うか
を意識することが、拡張性の高いIoTシステム設計につながると考えています。

